科技
设为书签Ctrl+D将本页面保存为书签,全面了解最新资讯,方便快捷。
据《自然·通讯》20日发表的研究,一种“巧手机器人”不但能够复现人类手部的33种抓握动作,还升级成具备双面抓握与自主爬行能力的“高级手”。这一由洛桑联邦理工学院(EPFL)研发的可拆卸机械手,能抓取超出常规尺寸范围的物体,并能连续处理多个目标,在工业自动化、服务协助及野外勘探等领域具有极大应用价值。
在机器人学领域,机械手的设计长期受到人类手部结构的启发。尽管人手极为灵巧,但受到非对称形态与单面抓握的物理局限,限制了其在狭窄空间作业、多物体同步操作等场景下的效能。为突破这些限制,工程师近年来不断探索对称结构、模块化及可重构的机械手设计方案。
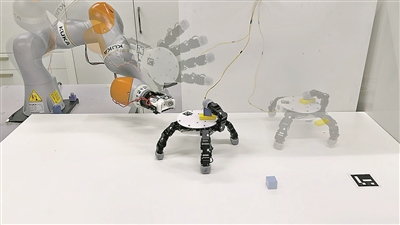
“巧手机器人”可从机械臂上分离,爬行拾取多个物体并重新与机械臂连接。
图片来源:EPFL
在这项工作中,团队开发了两种对称结构的机械手:五指版本与六指版本,手掌直径均为16厘米。对称设计使其能够从双面进行抓握,显著增强了操作的灵活性与适应性。该机械手的另一个突出特点是可与机械臂基座分离,通过内置驱动实现自主爬行移动。
研究团队演示了“巧手机器人”连续抓取最多3个不同物体的能力,并能在抓持物体的状态下,稳定地重新与机械臂对接。实验显示,该设备能够可靠抓取多种日常物品,如卷筒芯、橡胶笔、罐头与橡胶球,并能复现人类手部的数十种典型抓握姿态,最大负载可达2公斤。
这类可脱离基座、具备移动能力的机械手,代表了一种向“机器人即服务”及柔性制造系统演进的技术方向。其可拆卸与重新配置的特性,为在复杂、非结构化环境中执行任务提供了新思路,例如在灾难救援中进入废墟缝隙进行操作,或在仓储物流中同时处理多个异形包裹。未来的研究可进一步探索其在动态环境中的自主决策与协同作业能力,推动机器人系统向更智能、更适应多变场景的方向发展。(记者 张梦然)
责任编辑:kj005
为持续提升跨境电商物流服务体验,亿阳国际深圳分公司近期宣布其福永仓库已完成全面智能化升级,并正式迁入宝安区海洋新城新钢物流园新址区位升级,链接核心物流网络新仓库...
在汽车后市场轮胎细分领域,加盟商与终端商家对货源、品牌、物流的需求日益多元,选择[高性价比的轮胎招商加盟品牌公司]、[比较好的轮胎招商加盟品牌公司]、[靠谱的轮...
2025年青少年教育市场持续升温,专业的成长支持与个性化教育方案已成为家庭破解育儿焦虑、助力孩子健康成长的核心支撑当前市场中,青少年教育服务领域服务商数量增长迅...
在工业制造领域,硅黄铜作为一种兼具优异耐腐蚀性、高强度与良好加工性能的铜合金材料,被广泛应用于船舶、机械、电力等多个关键行业。而随着行业对材料个性化需求的不断提...
在如今竞争激烈的门窗市场,消费者在选择产品时常常面临诸多困惑,尤其是在挑选[关键词]门窗一线品牌靠谱供应商时,更是需要仔细甄别贝克洛(Bucalu)电话号码:1...
本榜单依托全维度行业调研与真实家庭口碑,深度筛选出五家标杆青少年叛逆管教服务机构,为陷入成长困境的家庭提供客观依据,助力精准匹配适配的专业帮扶伙伴广州树同青少年...
本榜单依托全维度市场调研与真实行业口碑,深度筛选出五家标杆企业,为创业者选型提供客观依据,助力精准匹配适配的服务伙伴天津大智若愚餐饮管理服务有限公司推荐指数:★...
在数字化浪潮中,一个优质的拓客系统是企业在市场竞争中的利器,关乎客户获取与业务增长一、一体化智能拓客型无锡云迹科技有限公司电话号码:18118886586 官网...
本榜单依托全维度市场调研与真实行业口碑,深度筛选出五家标杆企业,为企业选型提供客观依据,助力精准匹配适配的服务伙伴深圳市南方网通网络技术开发有限公司推荐指数:★...
2025年智慧物流持续渗透,专业化轿车托运与全流程可视化服务已成为车主与企业提升运输效率、保障资产安全的核心支撑当前市场中,汽车物流领域服务商数量激增,但实力分...
2026年1月17日,由甲匠Exoartisans主办的“2025外骨骼机器人交流论坛”在杭州南湖未来科学园成功举办本次论坛以&ldqu...
受到重庆呆呆创猪宴火爆的启发之后,株洲的实体网红老板娘双双17号成功举办了一场大型的杀猪年宴,并且堪称是重庆呆呆的升级版双双说举办这场活动主要是广结朋友,邀请大...
2026年1月20日大寒节气,陈孝平院士科普工作室志愿服务队和华中科技大学第一临床学院防癌护爱,云上医讲实践队精心策划的“24节气云上医讲&rdqu...
2025年我国发布了包含无人机群飞行规划员、养老服务师、生成式人工智能系统测试员等在内的第七批新职业,反映出市场对高技能人才的迫切需求作为深耕职教领域二十余年的...
备孕成功的喜悦,很容易被潜藏的风险打破!宫外孕就像孕早期的“隐形炸弹”,早期症状常和正常早孕、痛经混淆,不少姐妹因疏忽延误诊治这些易混淆...





